Re-Space: Swarm-based Robotics for Moving Furniture
A downloadable project
Re-Space: Swarm-based Robotics for Moving Furniture
Introduction
Changing room layout is important as it allows the school and teachers to meet the needs of different classes and situations. But teachers do not have the time and often can’t easily move all the furniture in a different arrangement. Our product is designed to solve this problem.
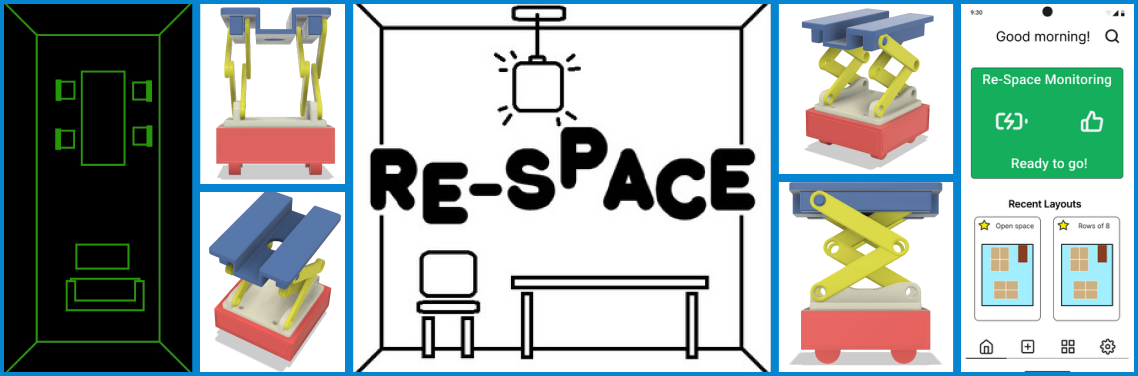
As of 2019, 55% of teachers opt to change the layout of their classroom at least once a month [1]. To solve this problem we are employing a robotic swarm that maps a classroom/hall using a LIDAR sensor and navigates to the furniture, rearranging the space with an easy to use front end app where you drag and drop furniture where you want.
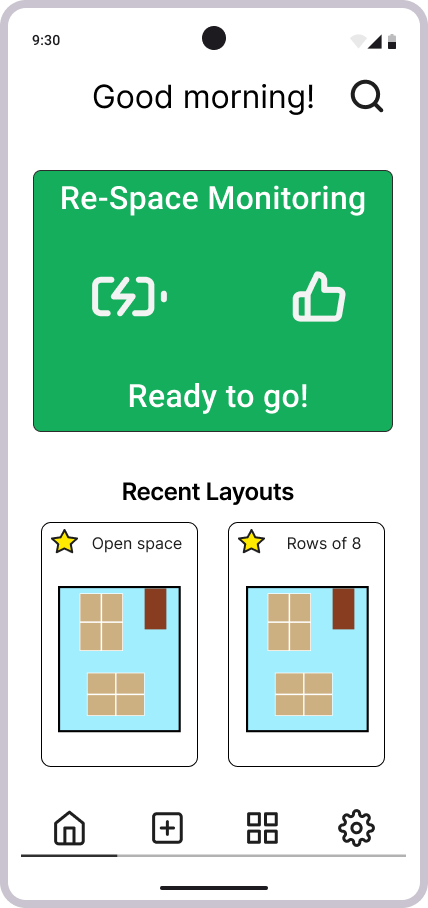
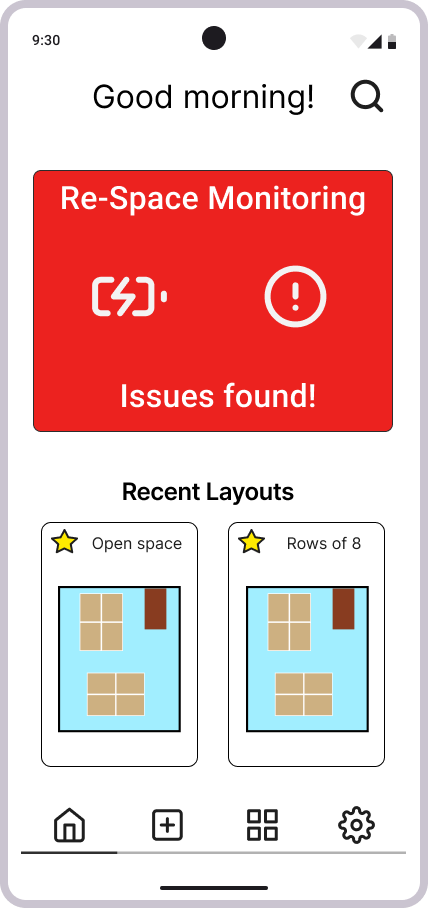
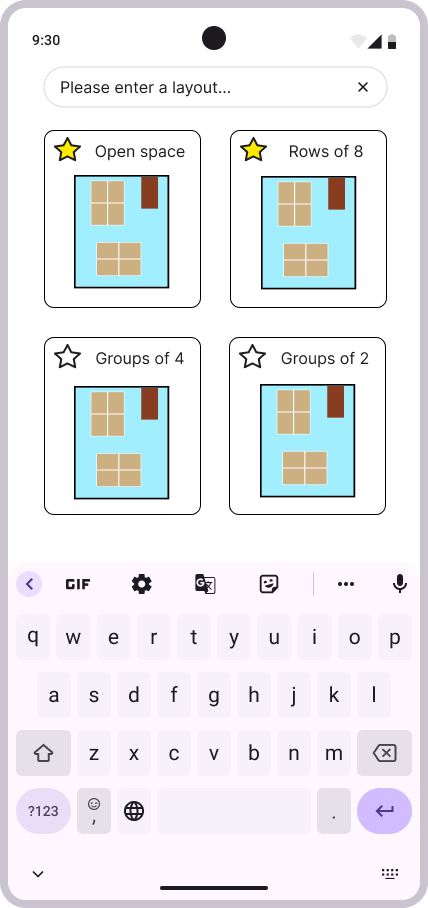
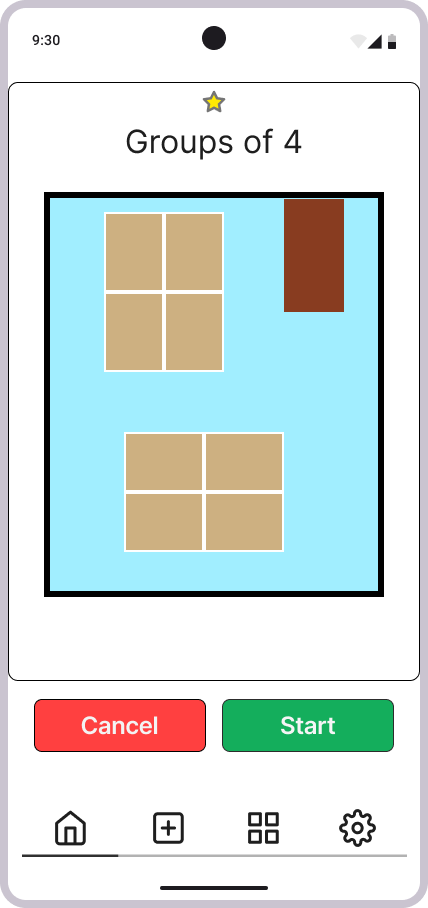
Application Mock-up
For the client aspect, a user-friendly application will be implemented. This will allow users control over their system as well as setting layouts, making new ones, and checking on the systems health. Mock-up images of the application can be seen down the side of this page.
3D Model
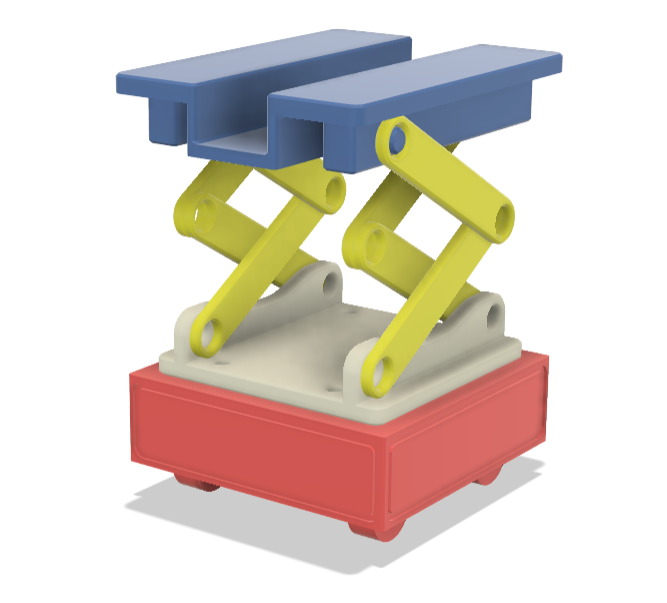
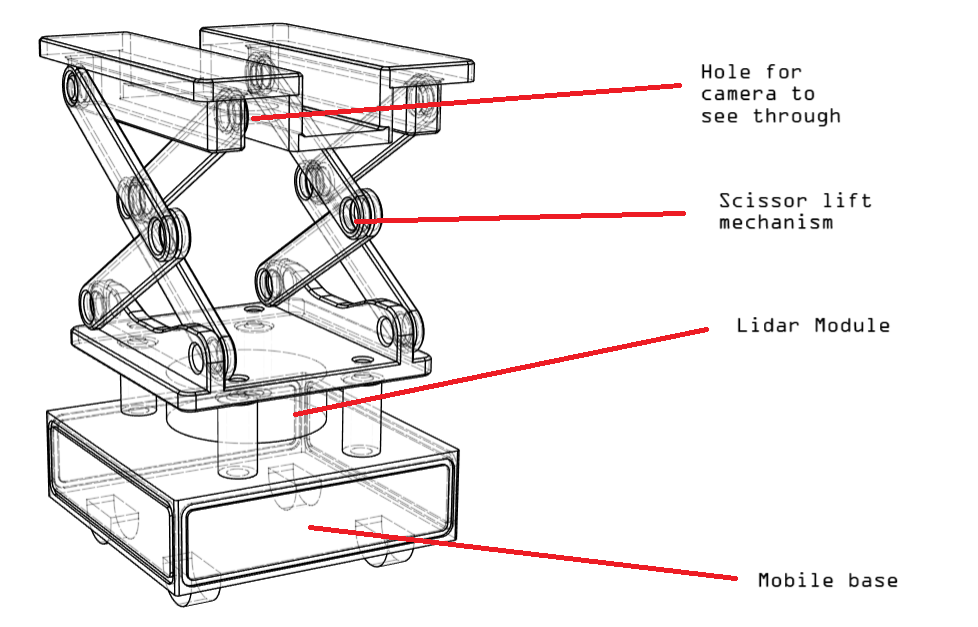
Above is an example of a worker robot. This robot is autonomous and equipped with multiple features. These features include scissor lift for lifting the furniture, wheels equipped under the base for making it mobile, a top facing camera hole for detecting the QR codes, and a space just under the scissor lift for the LIDAR sensor.
Features and Roles
Robotics:
4-5 Roboticists
- Maya Rogers- PCB designer (electronics)
- Cas Penfold - Hardware engineer 1
- [x] - Hardware engineer 2
- Ronny Ben Yehuda - Machine vision designer
- Josh Beckett - Swarm behaviour architect
Computer Science:
3-4 Computer scientists
- Alex Purser - Networking infrastructure engineer
- Louis Douglas - Front-end developer
- Victor - LIDAR detection developer
Languages








All language logos credited to icons8.com. [2]
Background
Market research
The main focus of this project is to resolve labour intensive scenarios, in this case, the reorganising of furniture in schools and classrooms. Room organisation is crucial in education for maximising space efficiency and adapting the classroom for teaching styles. A survey conducted by MDR education [1] of 1685 teachers in the US found "Twenty-one percent of teachers reported changing their classroom desk configuration every few months, followed by 14% who change it once a month, and an ambitious 13% who change their classroom around multiple times a day." With teachers in larger schools less likely to alter their classrooms multiple times a day likely due to the extra work and time involved in moving excessive amounts of furniture. Elementary school teachers were much more likely to change their classrooms multiple times a day as there is a greater need for larger spaces available for movement and furniture being much less cumbersome to move around since all items are small to accommodate a young child. One of the more overarching concerns of teachers was with gaining more space, wanting either larger classrooms or more open space.
Changing the room layout is often used by teachers to encourage different forms of learning. [3] For example, rows and columns are adopted when individual or pair work is preferred and squares of tables are adopted when more interaction is encouraged. [3] From primary research another implementation could be assembly halls where they are often multipurpose: tables and chairs for lunchtime, and open space for indoor PE or assembly. As stated by [3], often times different students required different learning styles, some needing the ability to be more active [3].
Repetitively lifting heavy objects over time has been theorized to contribute to back pain due to compression of the spine with a higher volume than average in airport baggage handlers displaying musculoskeletal complaints [4]. It is also widely known that lifting in the wrong way can greatly increase risk of back injury (such as disc injuries) and back pain [5]. In addition, a paper from the Queensland Injury Surveillance Unit they report the cases of injuries related to furniture and large appliances in 14 hospitals over three years. They go into specifics about which items of furniture caused these injuries with chairs chairs, stools and tables making up nearly 40% of the injuries seen [6]. This displays a clear need for alleviating heavy lifting strain from every day life to help prevent injury and accumulated stress to the lower back overtime, something that could take the load entirely would reduce workplace injuries and protect from long term health implications.
The ability to move furniture with more ease could alleviate stress and potential injuries put on teachers as well as allowing for easier alterations to their classrooms to suit whatever teaching style they feel necessary at the time.
Primary Research
Our primary research can be downloaded at the bottom of the page.
Alternate example: Roomshift
RoomShift is a system consisting of shape-changing swarm robots designed to reconfigure physical spaces in synchronisation with virtual reality (VR) environments.[7] It demonstrates the feasibility of using multiple robots to work together to dynamically move and reconfigure physical objects (e.g., furniture). The robots are equipped with scissor lifts made from expandable laundry racks, showing a practical method to lift and reposition furniture. The system adjusts the physical layout in real-time, similar to our idea of dynamic room reorganization via a web app. The paper's system synchronises with a VR environment, showing a framework for remote control that can be applied to our web app interface for controlling the robots.
Our product is mechanically feasible due to studies such as Roomshift that have undertaken similar challenges in the past.
Back-end technology
LIDAR
For the scanning and mapping part of the project, we have gone with Light Detection and Radar (LIDAR). As stated by oceanservice.noaa.gov: "LIDAR is a remote sensing method that uses light in the form of a pulsed laser to measure ranges." [8] One LIDAR module will be mounted to each worker robot, giving them necessary vision to navigate their way around the room. This will be used to map the entire floor, a process which can be split across robots.
Below is an example of LIDAR in action from TeamHectorDarmstadt. [9]
QR code
To accurately detect the correct piece of furniture to move and pick it up in the centre, we will be using QR codes. Each piece of furniture will require a QR code sticker to be applied to its underside. When the worker robots navigate around, a top facing camera will scan for furniture specific QR codes to identify when they are aligned with the ideal piece of furniture. When mapping the room. each time a QR code is detected on the camera, its current position and orientation will be logged in the database, allowing for easy navigation and displaying on the application.
Charging Hub
Robot charging hubs act as a server for both the mobile app and the robot swarm. Both the swarm and hub will connect to a wireless access point for coordinating, mapping and moving pieces of furniture respectively.
Components
Central Server
- Raspberry Pi Single Board Computer – Likely a Raspberry Pi model 4b
- A small user interface display for status information
- Some input keys to set data such as wireless network details
- A suitable 5-volt supply to power the unit
- Wireless charging pads to charge the robots
Lidar Furniture Moving Robot
- Raspberry Pi Single Board Computer – Likely a Raspberry Pi Zero 2
- Arduino microcontroller board for low level logic, likely an Arduino Nano
- Motors with encoders for the locomotion of the robot
- Enough H-bridge motor drivers for the number of motors used
- Mechanum wheels for omnidirectional movement
- A camera for scanning QR codes, like a PlayStation Eye Camera or a Raspberry Pi camera
- A mechanism to actuate a scissor lift, likely a screw drive motor or linear actuator
- An appropriate battery and charge circuitry, and a wireless charging receiver
- Some form of voltage converter to create a stable 5 volts for the Raspberry Pi from the power source
- An off-the-shelf lidar sensor for each robot
- Various passive components and indicators, such as capacitors, resistors, LEDs etc.
- Possibly some infrared reflectance sensors to detect nearby obstacles
UML diagrams
UML Sequence
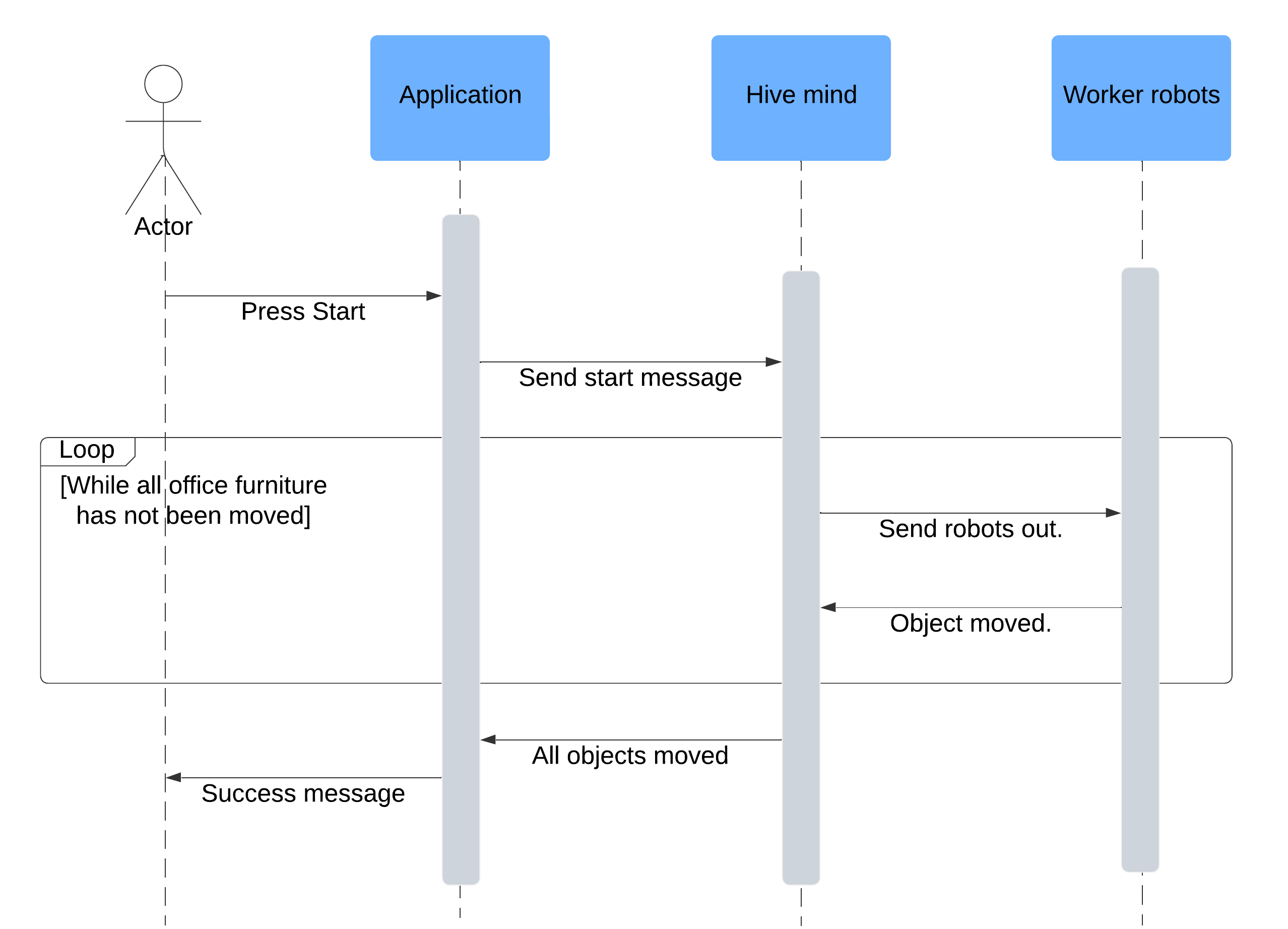
This UML sequence diagram demonstrates the order in which the system works. It starts with the user pressing start on the application, which will communicate with the hive mind telling it to release the worker robots. Until each desired piece of furniture has been moved, the worker robots will move all objects to the new location. After all objects have been moved, the worker robots return to their station and a success message is displayed to the user.
UML Class
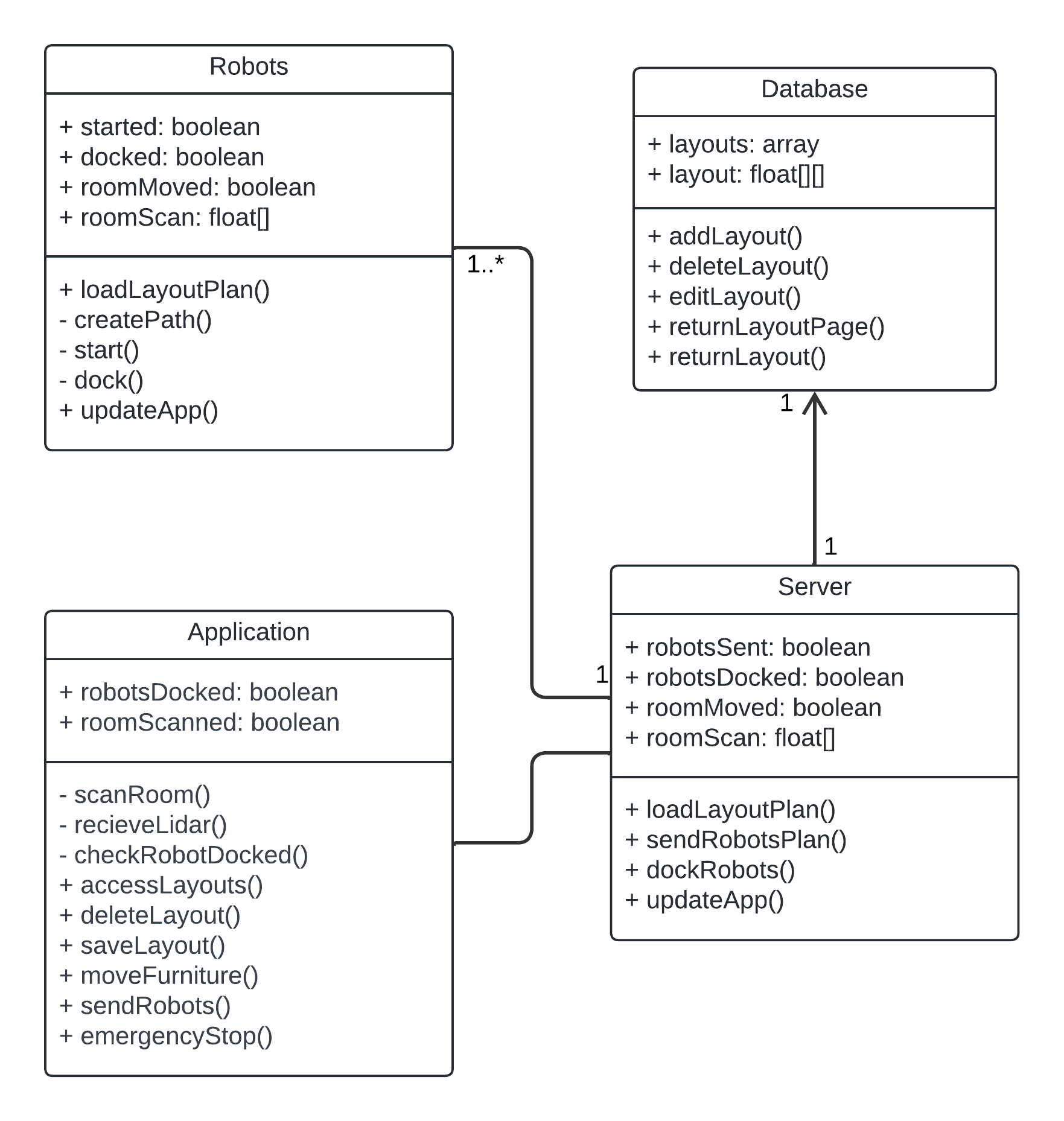
This UML class diagram demonstrates the classes, parameters, and relationships between each major component in this project. All of the communication runs through the server. This acts as the control centre for each other component, creating an organised and streamlined communication channel. The user friendly application allows the user to easily control the robots with the press of a few buttons. Developed "layouts" can be stored in the database for later use. The current desired layout selected by the user will be passed onto the server and sent to the worker robots to achieve this goal.
References
[1]
https://naturalpod.com/research-how-often-do-teachers-change-their-classroom-configuration/
[2]
[3]
Gao, Nan & Rahaman, Mohammad & Shao, Wei & Ji, Kaixin & Salim, Flora. (2022). Individual and Group-wise Classroom Seating Experience: Effects on Student Engagement in Different Courses. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies. 6. 1-23. 10.1145/3550335.
[4]
Low back load in airport baggage handlers - Henrik Koblauch - https://pubmed.ncbi.nlm.nih.gov/27034189/
[5]
Relationship between disc injury and manual lifting: A poroelastic finite element model study - R N Natarajan et. al - https://journals.sagepub.com/doi/abs/10.1243/09544119JEIM260
[6]
Injuries related to furniture and large appliances - R. Hockey et. al. - https://metronorth.health.qld.gov.au/qisu/wp-content/uploads/sites/22/2020/09/bulletin-71.pdf
[7]
[8] https://oceanservice.noaa.gov/facts/lidar.html#:~:text=Lidar%2C%20which%20stands%20for%20Light,variable%20distances)%20to%20the%20Earth.
[9]
Handheld Mapping System in the RoboCup 2011 Rescue Arena (youtube.com)
Download